Vine Robot Crane

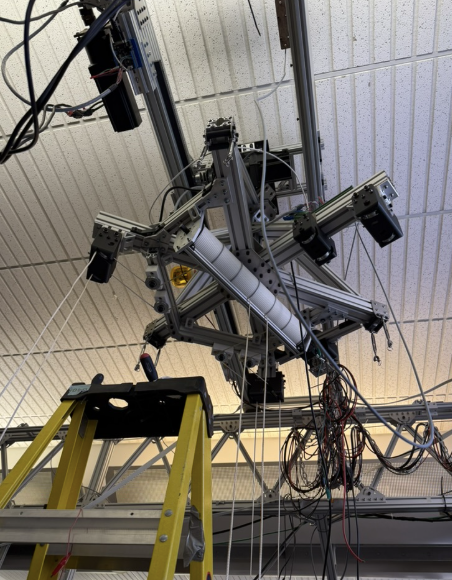
The SHI Vine Robot Crane project uses “loop-closure grasping” which is a soft, growing vine robot that starts in an open shape to reach and wrap around large objects, then closes into a loop to hold them gently but securely. The goal is to enable crane-scale handling in irregular environments where traditional rigid grippers struggle.
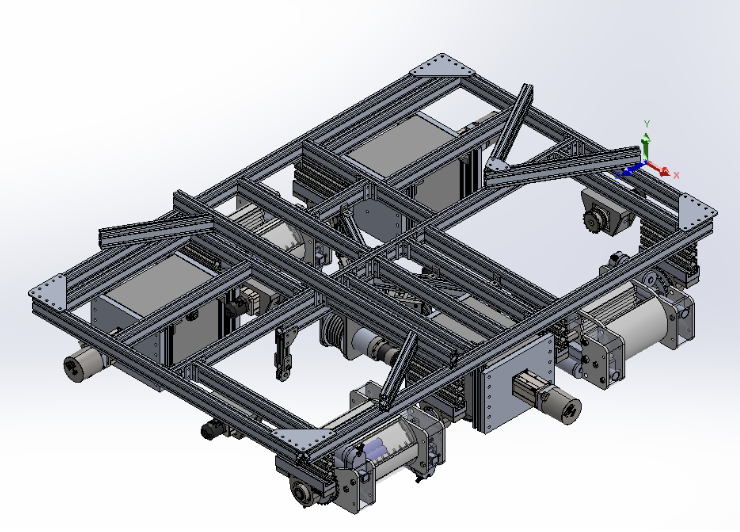
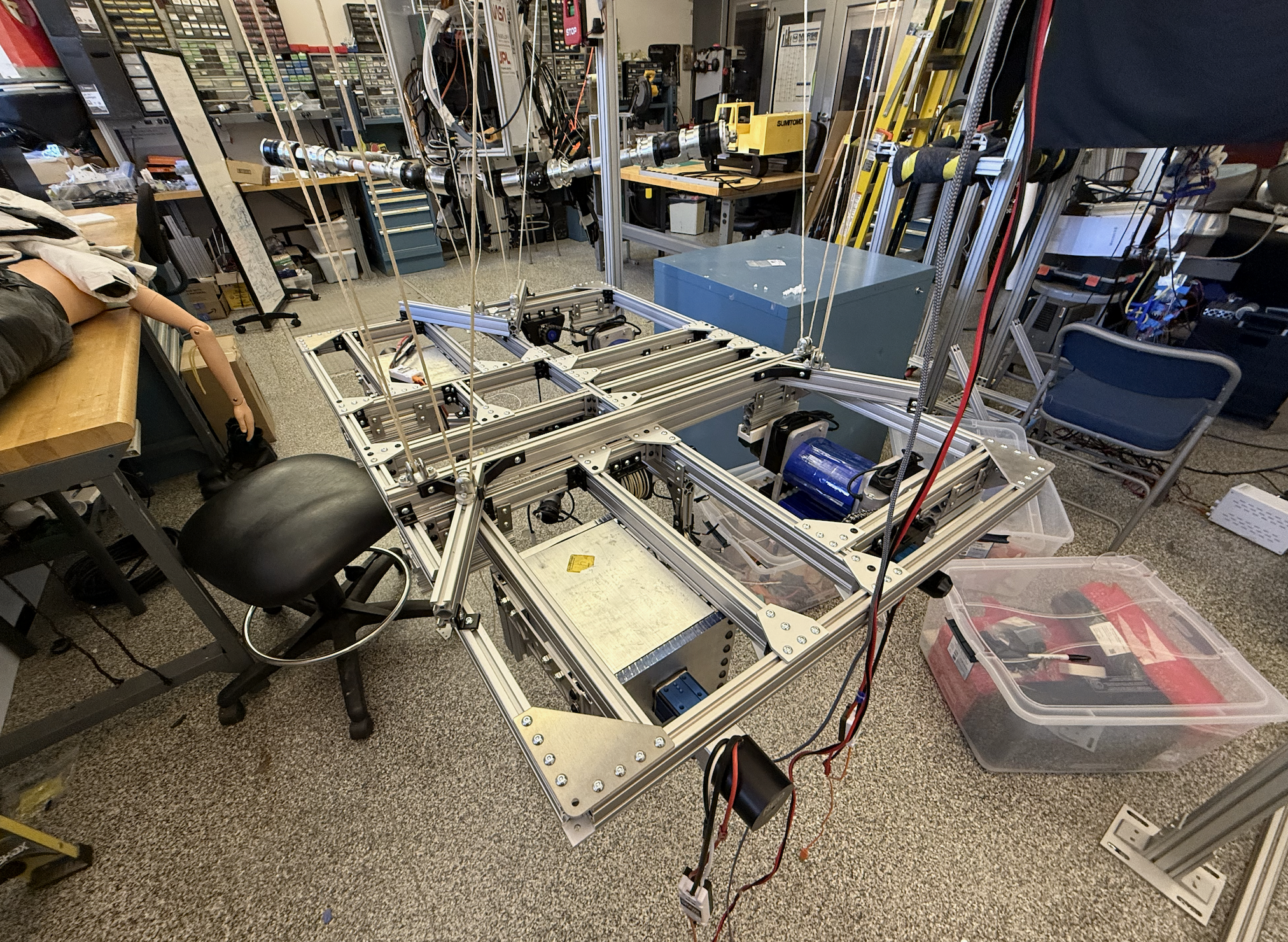
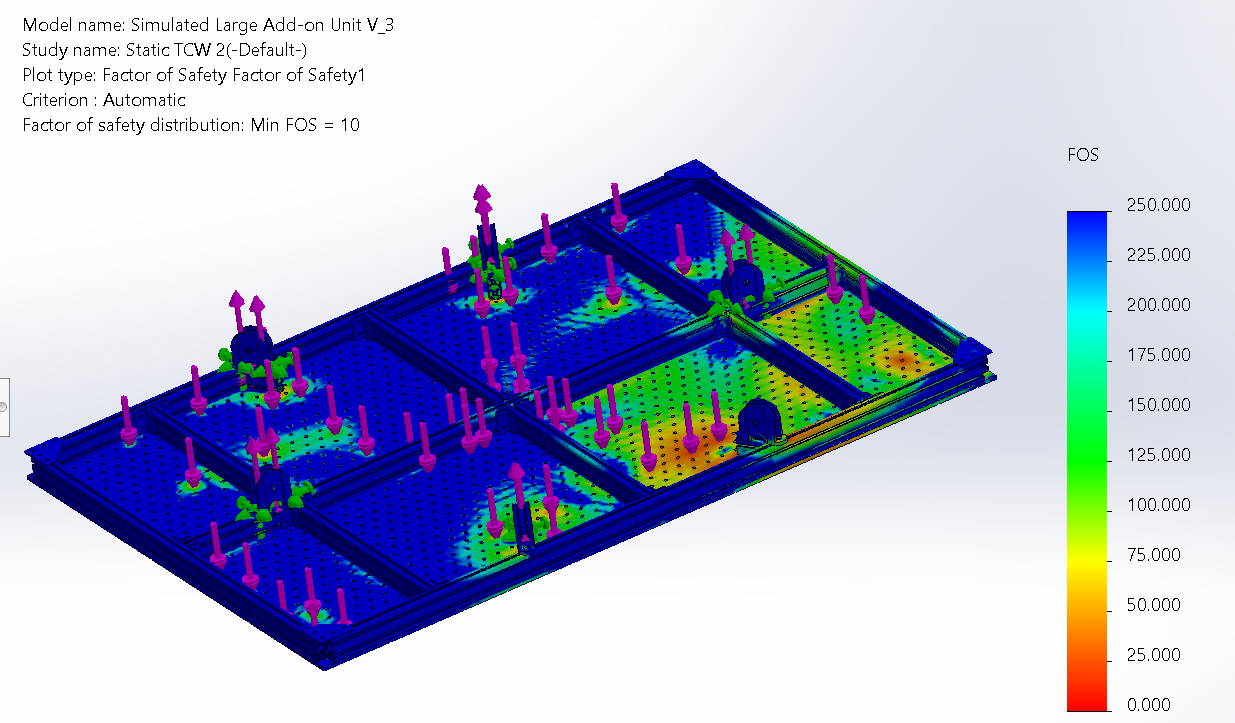
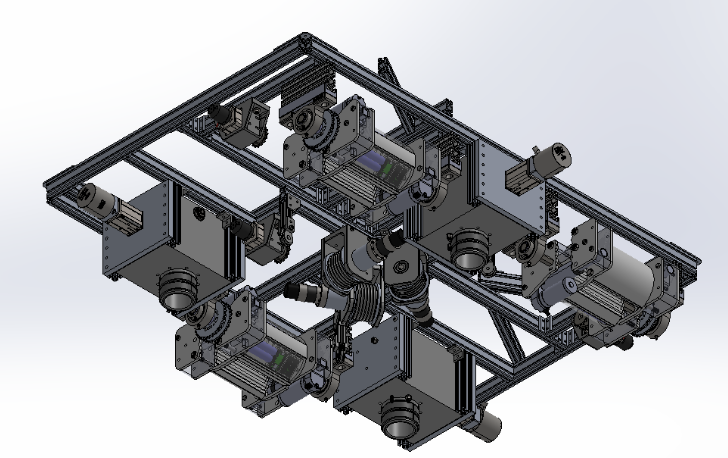
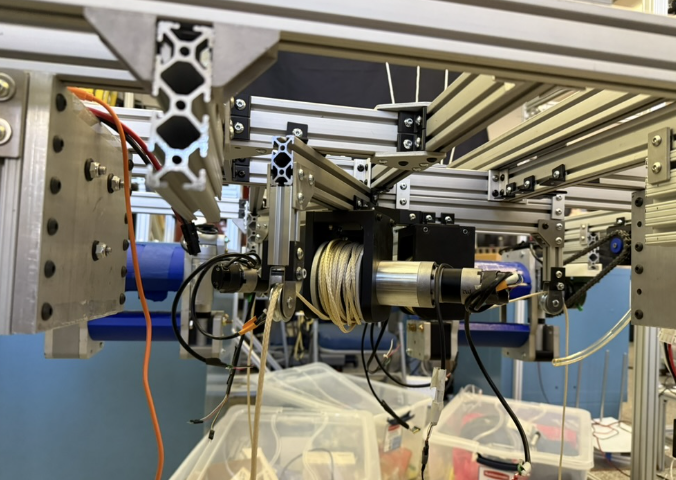
In this work, I helped deliver a modular grasping add-on unit that packages the full loop-closure system into a single, large-scale demo-ready module. The unit was designed to support multiple vine robot bases, tip-clamping winches, and precision winches while remaining stable under load using a balanced pulley layout.
Lab
MIT d’Arbeloff Laboratory
Date
06/25 - 12/25